AIR10-1420




快速、高精度、轻盈的10kg轻型负载机器人
- 紧凑的机械设计,节省安装空间
- 高达 ±0.02mm 的重复定位精度。
中空臂、内部走线设计
- 大幅度减少线缆外置造成的手腕运动空间干扰、线缆磨损及喷溅损坏
- 灵巧的腕部设计结构
- 高腕部防护等级IP67
- 能够轻松应对复杂恶劣的作业环境
安装维护便捷可靠
- 优化的整体设计,使零部件磨损率更低
- 使用寿命延长,备件更换迅速,安装维护便捷可靠
- 缩短因维修带来的停工时间,提高工厂生产效率
应用范围
- 主要应用于上下料、打磨抛光、焊接等较恶劣环境下的作业,以及搬运、码垛等高节拍需求的作业。
规格参数
| 型号/Type | AIR10-1420 | |
| 轴数/Axes | 6 | |
| 负载 / load | 10kg | |
| 机器人本体/Manipulator | 重量 / Weight | 160kg |
| 最大运动范围 / Reach | 1420mm | |
| 定位精度/Positioning accuracy | 位置重复定位精度 / Position repeatability | ±0.02mm |
| ———— | ———— | |
| 运动范围/ Working range | 轴1 / Axis 1 rotation | -170°/+170° |
| 轴2 / Axis 2 arm | -85°/+150° | |
| 轴3 / Axis 3 arm | -95°/+170° | |
| 轴4 / Axis 4 wrist | -195°/+195° | |
| 轴5 / Axis 5 Bend | -135°/+135° | |
| 轴6 / Axis 6 Turn | -360°/+360° | |
| 运动速度/ Rotation rate | 轴1 / Axis 1 rotation | 200°/s |
| 轴2 / Axis 2 arm | 200°/s | |
| 轴3 / Axis 3 arm | 200°/s | |
| 轴4 / Axis 4 wrist | 370°/s | |
| 轴5 / Axis 5 Bend | 370°/s | |
| 轴6 / Axis 6 Turn | 600°/s | |
| 适用控制柜/Controllers | inCube21 | |
安装条件
环境温度:0~45℃
湿度: 恒温下 95% 以内,无凝露。
允许高度:操作机正常工作环境的海拔高度不应超过 1000 米(在 1000 米 -4000 米高度范围内,操作机应降额使用)。
不应有腐蚀性、可燃性、易爆性气体
* 若去除机械限位,运动范围可达 -180°/+180°。
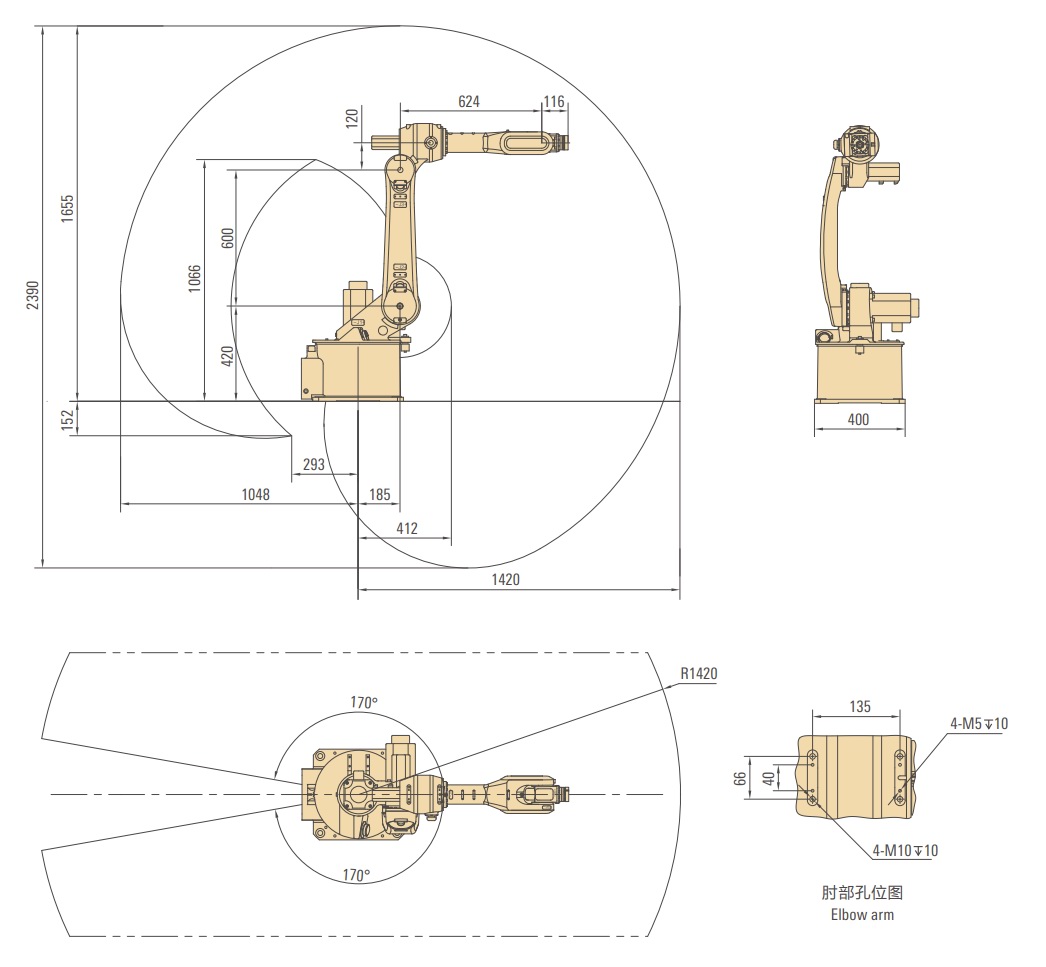
外形尺寸及运动范围
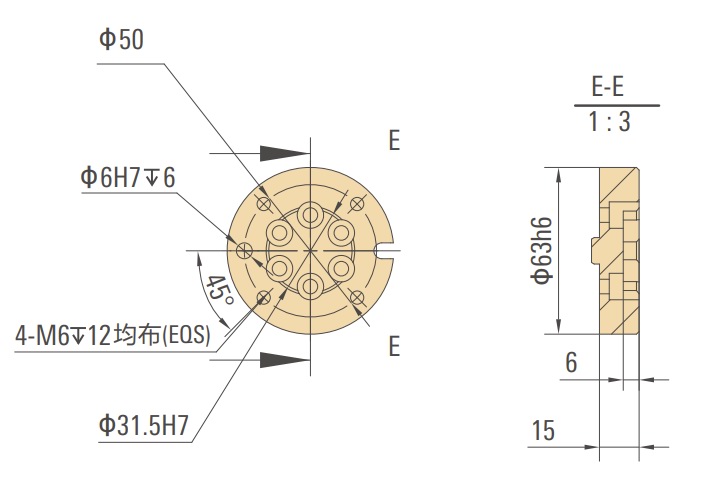
法兰图
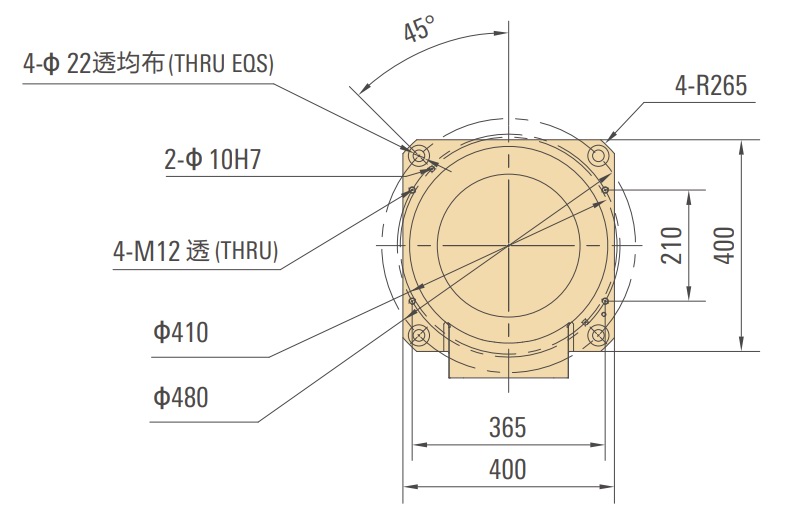
底座安装图
Previous
