MR20/20L

动作自如的7轴“腕”机器人
采用能做更复杂动作的7轴结构
- 可适用于先前的6轴结构所无法实现的在狭窄空间及有障碍物的场所下使用。
小巧紧凑的机身与强有力的手臂
- 可实现节省空间的布局设置。小巧紧凑的机身,宽裕的搬运能力,可搬运重量20Kg,最大为30Kg。
工作范围
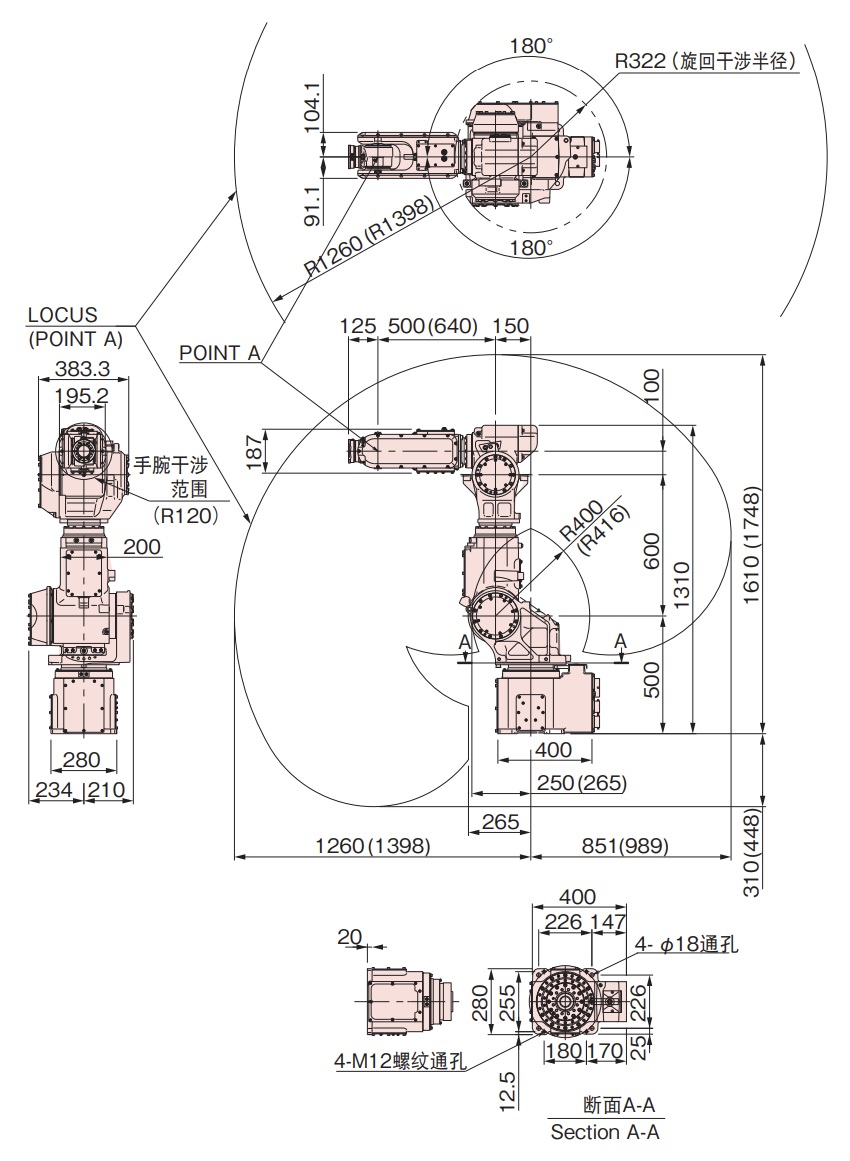
( )内表示MR20L-01的工作范围。
MR20-02
MR20L-01
(*1) 本产品的额定功率,规格,外部尺寸等如需改良而变更,恕不另行通告。
规格(型号)
| 型号 | MR20-02 | MR20L-01 | |
|---|---|---|---|
| 结构 | 关节型 | ||
| 自由度 | 7 | ||
| 驱动方式 | AC伺服方式 | ||
| 最 大 工 作 范 围 | JT1 | ±3.14rad (±180°) | |
| JT2 | +.96~-2.09rad (+55~-120°) | ||
| JT7 | ±3.14rad (±180°) | ||
| JT3 | +2.35~-2.89rad (+135~-166°) | ||
| JT4 | ±3.14rad (±180°) | ||
| JT5 | ±2.35rad (±135°) | ±2.42rad (±139°) | |
| JT6 | ±6.28rad (±360°) | ||
| 最 大 速 度 | JT1 | 2.96rad/s (170°/s) | |
| JT2 | 2.96rad/s (170°/s) | ||
| JT7 | 2.96rad/s (170°/s) | ||
| JT3 | 2.96rad/s (170°/s) | ||
| JT4 | 4.36rad/s (250°/s) | 6.28rad/s (360°/s) | |
| JT5 | 4.36rad/s (250°/s) | 6.28rad/s (360°/s) | |
| JT6 | 5.23rad/s (300°/s) | 10.5rad/s (360°/s) | |
| 可搬重量 | 20kg*1 | 20kg | |
| 手腕扭矩 | JT4 | 80.8N・m | 49N・m |
| JT5 | 80.8N・m | 49N・m | |
| JT6 | 44.1N・m | 23.5N・m | |
| 手腕惯性力矩*2 | JT4 | 6.0kg・m2 | 1.6kg・m2 |
| JT5 | 6.0kg・m2 | 1.6kg・m2 | |
| JT6 | 2.3kg・m2 | .8kg・m2 | |
| 位置重复精度 | ±.06mm | ||
| 最高使用空气压力 | 0.49MPa (5.0kgf/cm2)以下 | ||
| 周围温度 | 0~45°C | ||
| 设置条件 | 落地式,吊挂式 | ||
| 耐环境性*3 | 等同于IP65(防尘防水) | ||
| 主机重量 | 230kg | ||
1[rad] = 180/π[°], 1[N・m] = 1/9.8[kgf・m]
手臂上搭载的负荷为第1手臂或J3轴上部中任意一者。
※1:最大可搬重量30kg(限定工作范围)
※2:手腕容许惯性力矩因手腕负荷条件而不同,请注意。
※3:以JIS B 8432为依据。
※4:不可使用有机溶剂、酸、碱、氯系、汽油系切削液等使密封部件劣化的液体。
Previous
