MR35/50

采用可进行更加复杂动作的7轴结构
- 通过7轴化,使到目前为止6轴结构无法实现的在狭小空间以及有障碍物场所的机器人的应用成为可能。
- 根据手腕部可搬运重量的不同,备有MR35(可搬运重量35kg),MR50(可搬重量50kg)2种类型。
- 可供选择的有吊挂式,壁挂式,倾斜式设置方式。
高环境适应性
- 标准型号的本体、手腕部共同支持IP67。
- 在多种环境条件下,都能通过机器人大大提高生产率。
| 以往的机器人 | MR 系列7轴机器人 |
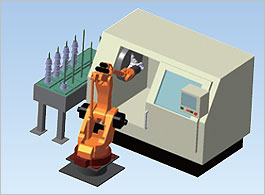 | 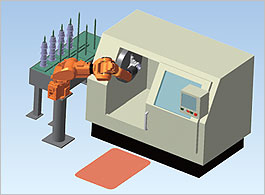 |
| 机器人占据了设备的正面 | 7轴结构的柔性动作; 机器人设置在设备的侧面; 作业空间较大,易于维护。 |
工作范围
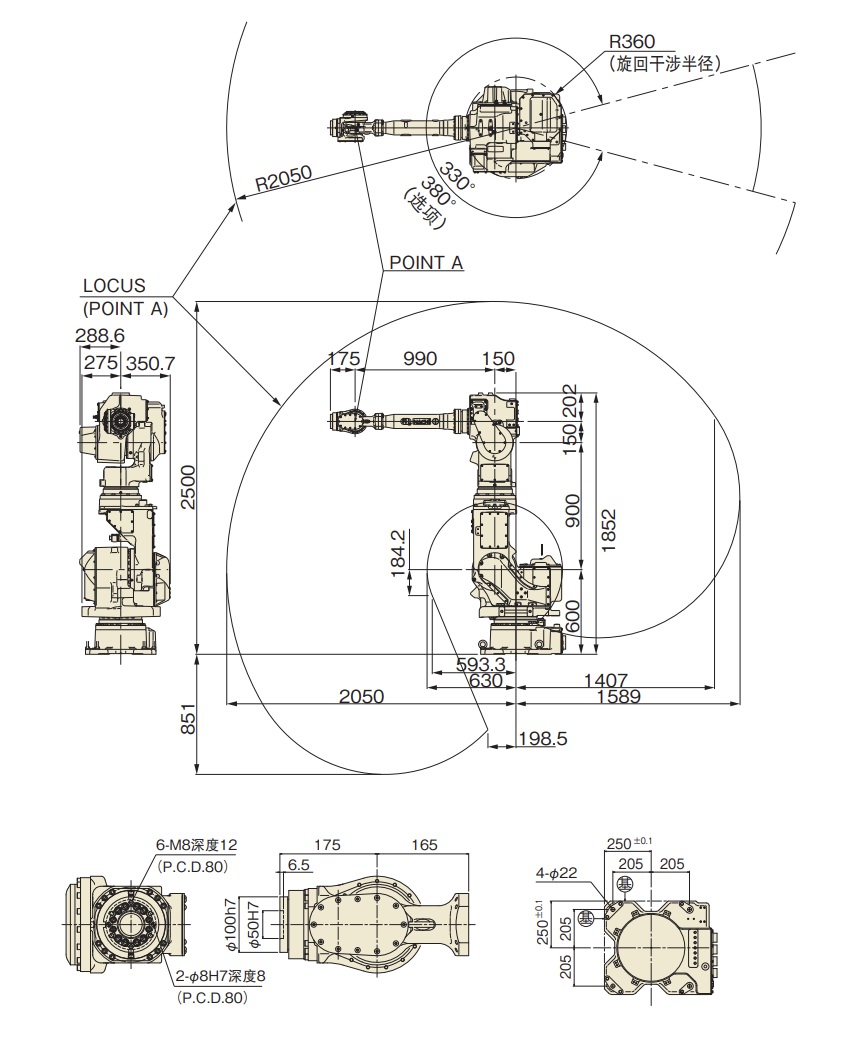
(*) 本产品的额定功率,规格,外部尺寸等如需改良而变更,恕不另行通告。
规格(型号)
| 型号 | MR35-01 | MR50-01 | |
|---|---|---|---|
| 结构 | 关节型 | ||
| 自由度 | 7 | ||
| 驱动方式 | AC伺服方式 | ||
| 最 大 工 作 范 围 | J1 | ±2.88rad (±165°) | |
| J2 | +2.53~-0.52rad (+145~-30°) | ||
| J3 | +2.44~-2.55rad (+140~-146°) | ||
| J4 | ±6.28rad (±360°) | ||
| J5 | ±2.18rad (±125°) | ||
| J6 | ±7.84rad (±450°) | ||
| J7 | ±3.32rad (±190°) | ||
| 最 大 速 度 | J1 | 3.14rad/s (180°/s) | 3.05rad/s (175°/s) |
| J2 | 3.05rad/s (175°/s) | 2.44rad/s (140°/s) | |
| J3 | 3.14rad/s (180°/s) | 2.88rad/s (165°/s) | |
| J4 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | |
| J5 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | |
| J6 | 7.33rad/s (420°/s) | 6.46rad/s (370°/s) | |
| J7 | 2.27rad/s (130°/s) | ||
| 可搬重量 | 腕部 | 35kg | 50kg |
| 上臂部 | 15kg | ||
| 手腕容许静载荷扭矩 | J4 | 160N・m | 210N・m |
| J5 | 160N・m | 210N・m | |
| J6 | 90N・m | 130N・m | |
| 手腕容许最大惯性力矩*1 | J4 | 16kg・m2 | 30kg・m2 |
| J5 | 16kg・m2 | 30kg・m2 | |
| J6 | 5kg・m2 | 12kg・m2 | |
| 位置重复精度*2 | ±.07mm | ||
| 最高使用空气压力 | 0.49MPa (5.0kgf/cm2)以下 | ||
| 周围温度 | 0~45°C | ||
| 设置条件 | 地面安装 | ||
| 耐环境性*3 | 主机部 | 等同于IP67(防尘防滴) | |
| 腕部 | 等同于IP67(防尘防滴) | ||
| 主机重量 | 745kg | ||
1[rad] = 180/π[°], 1[N・m] = 1/9.8[kgf・m]
※1:手腕容许惯性力矩因手腕负荷条件而不同,请注意。
※2:以JIS B 8432为依据。
※3:悬吊安装、壁挂安装、倾斜设置是选项。
※4:不可使用有机溶剂、酸、碱、氯系、汽油系切削液等使密封部件劣化的液体。
Previous
