协作机器人 JZJ10X-130

产品概况:
- 负载:10kg
- 最大工作半径:1300mm
- 重复定位精度:±0.03mm
- 本体重量:32kg
- 主要用途:搬运、打磨、装配、检验、服务等。
- 应用行业:工业制造业、餐饮服务业、医疗服务业等。
功能特点:
- 远程交互更智能;
- 易操作易维护,运行速度快;
- 结构紧凑,灵活轻巧;
- 安全稳定,可靠性强。
控制柜:

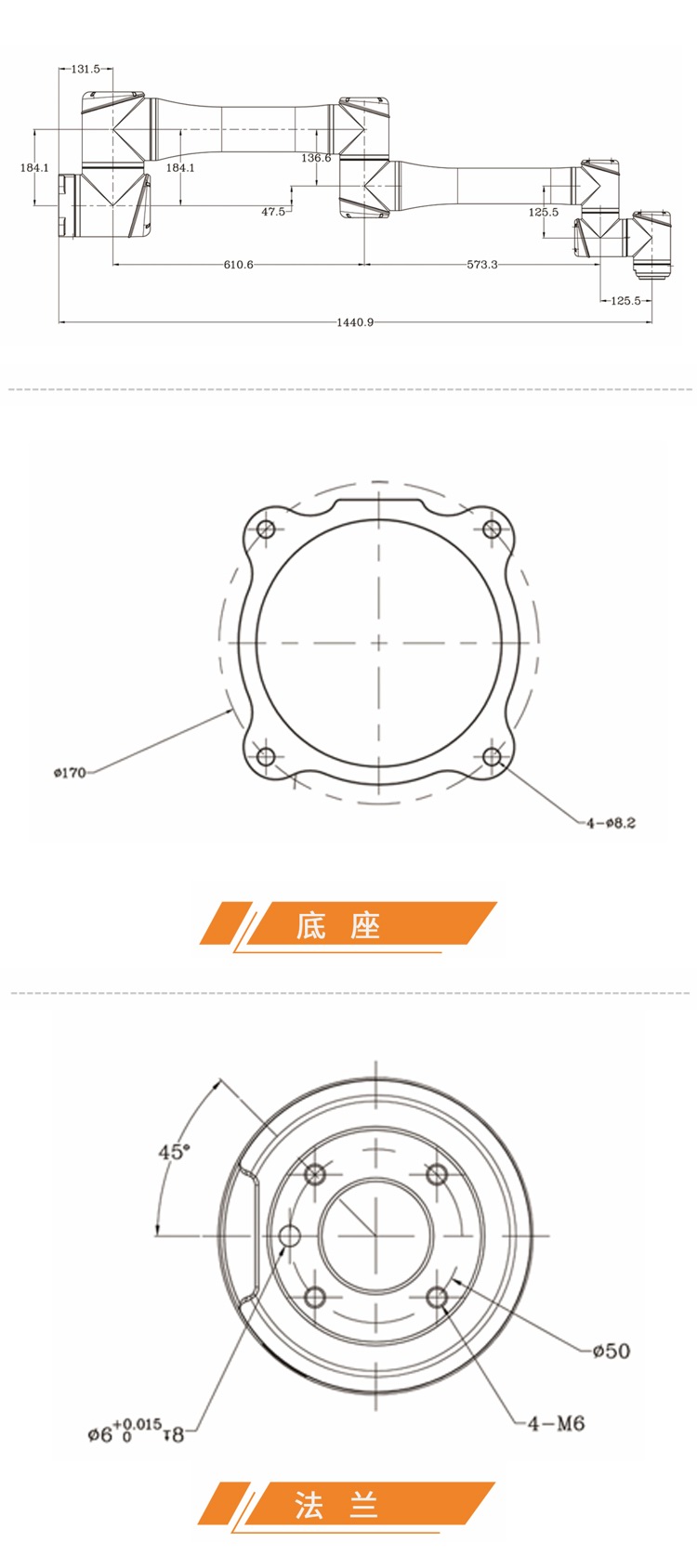
产品安装接口及工作范围图:
本体技术参数
| 机器人型号 | JZJ10X-130 | |
| 手臂形式 | 垂直多关节 | |
| 动作自由度 | 6轴 | |
| 最大负载 | 10KG | |
| 最大行程 | 1轴 | -170°~170° |
| 2轴 | -100°~100° | |
| 3轴 | -60°~240° | |
| 4轴 | -170°~170° | |
| 5轴 | -100°~100° | |
| 6轴 | -350°~350° | |
| 额定速度 | 1轴 | 81°/S |
| 2轴 | 81°/S | |
| 3轴 | 121°/S | |
| 4轴 | 182°/S | |
| 5轴 | 182°/S | |
| 6轴 | 182°/S | |
| 重复定位精度 | ±0.03mm | |
| 最大工作半径 | 1300mm | |
| 本体重量 | 32kg | |
| 安装方式 | 任意 | |
| 安装环境 | 环境湿度 | 0~45°C |
| 相对温度 | 20%~80%(无结露) | |
| 振动 | 0.5G以下 | |
| 其他 | 安装地远离易燃或腐蚀性气体、液体,避开电气干扰 | |
| IP等级 | IP54 | |
| 功率(KVA) | 0.8 | |
控制柜技术参数
| 外形尺寸 | 400*460*260mm |
| 概略质量 | 18kg |
| 冷却方式 | 强制风冷 |
| 电源规格 | 单相三线制 AC220V 50/60HZ |
| 接地 | 工作接地(接地电阻100Ω以下专用接地) |
| 输入输出信号 | 16DI/16DO |
| 位置控制方式 | 串行通信方式 EtherCAT |
| 可扩展外部轴数 | 最多6个 |
| LAN(上位连接) | TCP/IP |
| 串口I/F | RS485(1个) RS232(2个) CAN(2个) USB2.0(1个) |
| 驱动单元 | / |
| 安全接口 | / |
| 环境温度 | 通电:0~+45°C 存储时:-20~+64°C |
| 相对湿度 | 10%~90%(不结露) |
| 海拔 | 海拔1000m以下,超过1000m,每增加100m,周围温度降低1%,最高可在2000m使用 |
| 振动 | 0.5G以下 |
| 盘间线长度 | 5m |
Previous
